Piloter un relais. Transistor unipolaire ou bipolaire ?
Lorsque l'on désire alimenter la bobine d'un relais, la plupart du temps nous utilisons un transistor NPN du type 2N2222 ou 2N3904.
Mais pourquoi pas un MOSFET canal N ?
Quel est le but recherché lorsque l'on commande un relais à l'aide d'un transistor ?
Le but est bien sûr d'obtenir la chute de tension la plus faible possible dans le transistor, ce qui garantira que la bobine de celui-ci sera suffisamment alimentée pour faire coller les contacts.
Nous allons donc ici essayer les deux technologies, expliquer les choix et les détails de la mise en œuvre, et bien sûr mesurer le résultat.
1. Le relais
Le relais que je vais utiliser est un relais chinois très connu, le
SONGLE SRD-05V DC-SL-C.
Ses contacts ont un pouvoir de coupure de 7A sous 250V.
Sa bobine se contente de 5V et a une résistance de 70Ω.
Nous allons donc devoir choisir un transistor supportant au minimum un courant de 5V / 70Ω = 71.4mA.
Si vous voulez piloter un relais 12V, il vous suffit de remplacer dans les schémas suivants la tension de bobine de 5V par 12V.
1.1. La diode de roue libre
Dans tout schéma utilisant une solénoïde, en particulier un relais, nous trouvons une diode dite "diode de roue libre" montée en inverse sur la bobine. Supprimons cette diode et examinons ce qui se passe lors de la coupure du courant :
 |
| Tension sur le collecteur |
On voit sur cet oscillogramme un pic de tension de 100V sur le collecteur du transistor !
La mesure est faite avec une sonde / 10.
 |
| Tension d'alimentation 5V |
On voit également des perturbations énormes sur la ligne d'alimentation 5V : jusqu'à 1.5V aussi bien en positif qu'en négatif pendant 100µs.
Ces perturbations pourraient facilement provoquer le plantage d'un microcontrôleur ou d'un module.
Avec la diode de roue libre ces surtensions disparaissent :
 |
| Tension sur le collecteur |
 |
| Tension d'alimentation 5V |
La diode de roue libre protège le transistor de commande contre les
surtensions lors de la coupure du courant dans la bobine. Elle permet également de supprimer les perturbations sur l'alimentation.
Pourquoi le 2N2222 ne claque-t'il pas lors de l'essai sans diode alors qu'il ne supporte que 30V de tension émetteur / collecteur ?
- la surtension est brève
- le relais est petit
- le 2N2222 est costaud
- et enfin : la chance ...
Il est plus rationnel de choisir une diode rapide plutôt qu'une diode de redressement du type 1N4004. La 1N4148 a un "recovery time" de 8ns, contre 30µs pour la 1N4004.
On voit ici qu'une 1N4004 laisse passer une légère surtension :
Cette surtension pourrait être plus importante avec un plus gros relais.
Comment dimensionner une diode de roue libre ?
Pour cela il est indispensable de connaître les caractéristiques du relais :
La résistance est facile à connaître, elle est précisée dans la datasheet du relais. Il n'en va pas de même pour l'inductance.
On peut la mesurer avec un inductancemètre. Ce petit multimètre GM328, à base d'ARDUINO, que l'on peut facilement trouver chez les revendeurs chinois, affichera l'inductance et la résistance du relais :
La résistance série du relais limite le courant. Connaître la valeur de l'inductance permet de déterminer en combien de temps ce courant va être amorti.
Par exemple, pour un relais classique 5V SRD-05V DC-SL-C :
- résistance : 70Ω
- inductance : 20mH
Le courant dans la diode n'excédera pas 5V / 70Ω = 70mA.
La diode 1N4148 supportant 300mA en continu, on ne se préoccupera même pas de savoir combien de temps ce courant de 70mA va durer.
Conclusion pour un relais courant 5V ayant une résistance de bobine de plus de 20Ω, le choix sera facile : 1N4148, sans réfléchir.
Elle conviendra à la grande majorité des relais sur le marché.
Pour celui-ci par contre le problème est-il différent?
 |
| OMRON OCB G9EC-1-B 12VDC |
Il supporte jusqu'à 200A.
Sa résistance de bobine est de 12.8Ω, ce qui donne un courant maximal de presque 1A.
La datasheet ne précise pas son inductance, mais une 1N4148 peut supporter un courant de 1A pendant 1 seconde. On peut supposer sans être désespérément irrationnel que la surintensité durera moins d'une seconde.
On peut faire une bonne approximation en disant que le courant retombe à presque ZERO au bout de 3 fois la constante de temps L/R.
Pour 300ms on obtiendrait :
L = 0.3 x 12.8 = 3.84 Henry, ce qui est absolument énorme et impensable pour un relais, sauf relais de très très grosse puissance.
En étant légèrement paranoïaque, en supposant que ce relais ait une inductance de 200mH, ce qui est très pessimiste, le temps de retombée du courant serait de
T = L / R * 3 = 0.2H / 12.8 * 3 = 45ms
Une 1N4148 suffira amplement.
Dans le doute on peut toujours adopter une diode UF4002 supportant 1A en continu, et 30A pendant 8.3ms, si l'on a affaire à un relais encore plus monstrueux que le modèle précédent.
1.2. La charge inductive
Un relais, lorsqu'il commute une charge inductive, va générer des pics de tension sur le secteur. Ces parasites peuvent facilement passer à travers une alimentation, y compris à découpage.
Cela peut engendrer un plantage du microcontrôleur ou d'autres composants périphériques, un écran TFT ou LCD par exemple.
1.2.1. Charge continue
Si la charge est continue (moteur, bobine de contacteur, etc.) il suffit d'utiliser la technique de la diode de roue libre. Dans cet exemple le relais 5V active un relais 12V ou 24V continus :
On peut se demander quel est l'intérêt de piloter un contacteur à l'aide d'un relais, alors qu'un transistor bien dimensionné pourrait être utilisé ? Si l'on possède une carte à relais du commerce, et que l'on doit piloter un contacteur de moteur triphasé par exemple, on n'aura guère le choix.
1.2.2. Charge alternative
Si la charge est alternative, la diode de roue libre est inapplicable. En effet l'alternance négative passerait directement dans la diode et la détruirait.
Je préconise ceci :
Un circuit RC (appelé snubber) est connecté entre la sortie du relais et le neutre, donc en parallèle sur la charge. Il absorbe les surtensions.
Le condensateur doit être de préférence du type X2 pour des raisons de sécurité, et supporter bien entendu 250V alternatifs :
On peut aussi utiliser une varistance 275VAC 350VDC à la place de ce circuit RC :
1.3. Le relais REED
Certains relais de faible puissance dits "relais REED" peuvent être pilotés directement depuis une sortie digitale de microcontrôleur :
Leur pouvoir de coupure est faible (0.25A à 1A) mais leur résistance de bobine est élevée (500Ω pour les modèles 5V) ce qui entraîne une consommation de 10mA, parfaitement acceptable pour la sortie d'un microcontrôleur.
Une diode de roue libre est néanmoins nécessaire, comme pour toute charge inductive. Voir paragraphe suivant.
1.4. Le relais statique
Le relais statique est un relais sans organe mécanique :
Leur entrée de commande consomme peu, de l'ordre de quelques mA à 30mA. Ils sont commandables directement par une sortie de microcontrôleur.
la diode de roue libre est inutile.
1.5. Le module relais
Dans le monde ARDUINO il existe des modules comprenant toute l'électronique de commande nécessaire :
 |
Module 1 relais
|
 |
Module 2 relais
|
Il faut faire attention à une chose : il existe des modules commandables
par un niveau haut, d'autre commandables par un niveau bas, et d'autres
sachant faire les deux comme le modèle ci-dessus (la sélection se fait
grâce aux cavaliers jaunes).
Ils sont commandables directement par une sortie de microcontrôleur. La diode de roue libre est intégrée au module.
Ce qu'il faut savoir d'un relais commandable par un niveau bas :
Au démarrage du microcontrôleur, les pins digitales sont en entrée. Le relais ne sera pas activé.
Si vous activez la broche par pinMode(pin, OUTPUT), la sortie vaudra
immédiatement zéro et le relais va être activé. Il faut immédiatement
passer la sortie à 1 :
pinMode(pin, OUTPUT);
digitalWrite(pin, HIGH);
ou :
digitalWrite(pin, HIGH);
pinMode(pin, OUTPUT);
On trouve également des relais statiques (ou SSR : Solid State Relay), qui ne comportent aucune pièce mécanique, et sont donc silencieux.
 |
Module relais statique 2A
|
 |
Relais SSR 10A
|
 |
Relais SSR 25A avec dissipateur
|
 |
| Module 8 relais SSR 2A |
La plupart des modules relais statiques du commerce sont limités à deux ampères.
Au delà il faut s'orienter vers des relais statiques beaucoup plus imposants, et le dissipateur devient quasiment indispensable.

Il est déconseillé de commuter des signaux audio avec un relais statique, car ceux-ci intègrent un triac ou un thyristor. Ce ne sont pas vraiment des composants linéaires
1.6. Les relais miniatures
On range dans cette catégorie tous les relais de petites dimensions :
 |
| Relais Songle 12V / 10A |
 |
| Relais Finder 12V / 6A |
Ces relais peuvent en général être implantés sur un PCB.
Leur tensions de bobine est en général comprise entre 5V et 60V continus. Un transistor de commande est impératif.
S'il s'agit d'un modèle 12V ou 24V, c'est bien évidemment indispensable.
Il existe également des modèles 6V à 240V alternatifs. Les commander à l'aide d'un simple transistor est exclu.
Certains modèles ont un pouvoir de coupure élevé : 40A à 80A.
Il est bien évident que les pistes du PCB devront être dimensionnées en conséquence.
Leur pouvoir de coupure impose une puissance de bobine importante. Il en découle que la résistance de leur bobine est faible, de l'ordre de 40Ω à 70Ω pour un relais 5V, ce qui engendre un courant de 70mA à 125mA.
1.7. Les relais industriel et contacteurs
Le relais industriel est plutôt réservé aux application de forte puissance. Il est souvent monté sur support ou rail DIN :
 |
| Relais Finder 55.32.8.024.0040 24V / 10A |
 |
| Relais Relpol RG25-3022-28-1024 24V / 25A |
 |
| Contacteur Legrand-SM-425-24V-2NO |
On trouve peu de relais industriels pouvant être implantés sur PCB.
Leur tensions de bobine est en général comprise entre 6V et 220V continus.
Il existe également des modèles 6V à 400V alternatifs.
Concernant leur commande, les règles sont les mêmes que pour les relais miniature.
2. Le transistor bipolaire
Tout d'abord il est déconseillé de choisir un transistor "petits signaux" du genre BC547. Il ne réussira pas à piloter la bobine du relais. Il vaut mieux s'orienter vers un transistor d'usage courant dit "General Purpose Transistor".
Nous allons essayer d'abord un PN2222.
Il
supporte une tension collecteur-émetteur de 30V, un courant de collecteur de 600mA
et a une tension de chute VCEsat p de 0.4V pour un courant de collecteur de 150mA et un courant de base de 15mA.
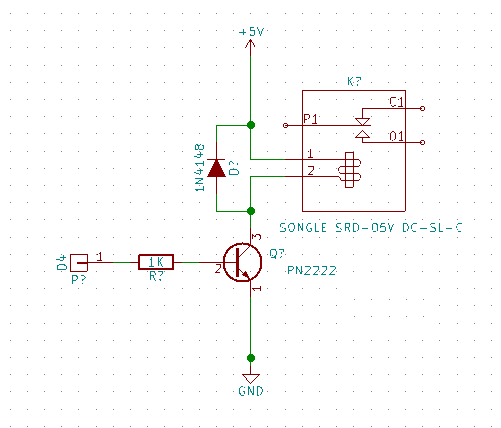
Voici le schéma de branchement.
Le transistor est piloté par une sortie du microcontrôleur à travers une
résistance de 1KΩ dont le but est de limiter le courant de base et de saturer le transistor.
Ce transistor a un gain minimal de 35 pour un courant de collecteur de 10mA, et 100 pour un courant de collecteur de de 150mA. Nous allons choisir une valeur médiane de 80 car nous allons commuter 70mA.
Pour assurer un courant de 70mA dans le collecteur nous aurons besoin de 70mA / 80 = 0.875mA.
Nous choisirons un coefficient de sécurité de 5, largement suffisant pour saturer le transistor. Ne descendez pas en dessous de 2.
Les transistors ont généralement une tension base - émetteur de 0.7V
La résistance de base vaudra donc (5V - 0.7V) / (0.875mA x 5) = 982Ω.
Maintenant que nous avons expliqué ces notions de base, nous allons
essayer de faire fonctionner ce montage à l'aide d'un ARDUINO NANO,
simplement alimenté par son cordon USB. La sortie utilisée est la D4.
Un petit sketch très simple :
#define RELAY_OUT 4
void setup() {
pinMode(RELAY_OUT, OUTPUT);
}
void loop() {
digitalWrite(RELAY_OUT, HIGH);
delay(2000);
digitalWrite(RELAY_OUT, LOW);
delay(2000);
}Mesurons maintenant la chute de tension entre collecteur et émetteur du transistor.
Elle est de 45mV.
Maintenant nous allons essayer un autre transistor, le 2N3904.
Il
supporte une tension collecteur-émetteur de 40V, un courant de collecteur de 200mA
et a une tension de chute VCEsat p de 0.95V pour un courant de collecteur de 50mA et un courant de base de 5mA.
Le montage sera le même, les deux transistors ayant des gains comparables.
Cette fois-ci nous obtenons une chute de tension de 133mV. C'est nettement moins bien qu'avec le PN2222, mais cela reste très acceptable.
Un autre transistor ? le 2N3053.
Il
supporte une tension collecteur-émetteur de 60V, un courant de collecteur de 700mA
et a une tension de chute VCEsat p de 0.3V pour un courant de collecteur de 150mA et un courant de base de 15mA.
La chute de tension avec le 2N3053 est de 70mV.
Parlons prix : le PN2222 ou le 2N2904 vous coûteront environ 0.05€.
Le 2N3053 coûte 0.25€.
Ces prix proviennent de chez TME, par cinq ou dix unités.
2.1 Utiliser un ULN2803A
Il serait tentant d'utiliser un ULN2803A, composé de 8 transistors darlington, pour piloter 8 relais. La chute de tension sera plus importante : environ 1V.
Avec un relais 5V il restera 4V aux bornes de la bobine. Les relais, heureusement, sont tolérants :
- un SONGLE SRD-05VDC-SRD réclame 75% de la tension nominale
- un OMRON G5RL-K1A-E réclame 70% de la tension nominale
- un FINDER 40.61.9.005 réclame 80% de la tension nominale
Avec certains relais (le FINDER par exemple), 4V de tension de commande risquent d'être insuffisants.
Par contre avec un relais 12V il restera 11V aux bornes de la bobine, ce
qui plus acceptable. Pour ma part je réserverais ce genre de montage à
des relais 12V ou 24V.
2.2 Piloter un relais 12V ou plus
On peut bien entendu piloter un relais 12V ou plus avec un arduino. Il suffit de modifier légèrement le schéma :
Le relais choisi est un
OMRON-G9EA-A 48V dont la bobine consomme environ 100mA. C'est un gros relais dont les contacts supportent 60A.
Jusqu'à 24V, le PN2222 pourra convenir. Au delà, on peut s'orienter vers un
2N4238, supportant 60V.
2.3. Piloter un relais bistable
Un relais bistable (latch relay) est un relais à deux états. Il n'est pas nécessaire d'alimenter la bobine en permanence pour le faire coller, une simple impulsion suffit.
Il y a deux sortes de relais bistables :
- simple bobine : il faut inverser le sens du courant dans la bobine pour l'ouvrir
- double bobine : ce relais possède une bobine pour le fermer et une bobine pour l'ouvrir
Bien entendu, il faut consulter la datasheet du relais pour connaître le sens de branchement.
Les schémas suivants sont extraits de montages personnels et fonctionnels.
2.3.1. Relais bistable simple bobine (version à transistors)
Voici un schéma permettant de commander un relais bistable une bobine à l'aide de deux sorties de microcontrôleur :
Il suffit d'une impulsion de 100ms sur l'une ou l'autre entrée pour fermer ou ouvrir le relais.
Le modèle proposé
OMRON-G5RL-U1A-E dispose de 2 contacts NO (normalement ouverts) en parallèle :
Le symbole schématique ne reprend pas le brochage du relais (c'est un symbole générique). La correspondance est la suivante :
1-8 (OMRON) -> 1-2 (schéma)
On peut aussi piloter un relais simple bobine avec seulement 4 transistors au lieu de 6, en supprimant les deux BC547, mais il faudra 4 sorties de microcontrôleur.
Dans ce cas, attention aux bugs : si Q2 et Q3 ou Q4 et Q5 conduisent en même temps, cela provoque un beau court-circuit. Adieu transistors ...
2.3.2. Relais bistable simple bobine (version à L293D)
Enfin on peut aussi piloter ces relais avec un
L293D :
On peut constater sur ce schéma la simplicité de la mise en œuvre. Un demi L293D remplace les six transistors précédents et tous les composants adjacents, y compris les diodes de roue libre.
Par rapport au schéma précédent l'encombrement sera nettement moindre.
Attention : le L293D est équipé de diodes, ce n'est pas le cas du L293.
Ce code permet de piloter 1 relais bistable simple bobine.
#define RELAY_EN_1_2 8
#define RELAY_IN1 7
#define RELAY_IN2 6
void setup()
{
pinMode(RELAY_IN1, OUTPUT);
pinMode(RELAY_IN2, OUTPUT);
pinMode(RELAY_EN_1_2, OUTPUT);
}
void relay_on(void)
{
digitalWrite(RELAY_EN_1_2, HIGH); digitalWrite(RELAY_IN1, HIGH);
delay(100);
digitalWrite(RELAY_IN1, LOW); digitalWrite(RELAY_EN_1_2, LOW);}
void relay_off(void)
{
digitalWrite(RELAY_EN_1_2, HIGH); digitalWrite(RELAY_IN2, HIGH);
delay(100);
digitalWrite(RELAY_IN2, LOW); digitalWrite(RELAY_EN_1_2, LOW);}
void loop()
{
relay_on();
delay(2000);
relay_off();
delay(2000);
}
Le L293D permettra de piloter 2 relais.
Sur le schéma un seul relais est branché et les entrées 3 et 4 sont désactivées (reliées à GND), mais il est facile d'ajouter un deuxième relais sur les sorties 3Y et 4Y et de les commander à l'aide de 2 sorties supplémentaires de l'ARDUINO connectées sur les entrées 3A et 4A.
Les entrées 1-2EN et 3-4EN (enable) peuvent être pilotées ensemble par une seule sortie de l'ARDUINO, ou pilotées séparément par deux sorties.
Elles peuvent être également directement reliées au +5V. Dans ce cas on n'en tiendra pas compte dans le code.
2.3.3. Relais bistable double bobine (version à transistors)
Ce schéma permet de commander un relais bistable deux bobines à l'aide de deux sorties de microcontrôleur :
Beaucoup plus simple n'est ce pas ?
Même principe : une impulsion de 100ms sur l'une ou l'autre entrée pour fermer ou ouvrir le relais.
Le modèle proposé
OMRON-G5RL-K1A-E dispose de 2 contacts NO (normalement ouverts) en parallèle :
Ici encore le symbole schématique ne reprend pas le brochage du relais. La correspondance est la suivante :
1-9-8 (OMRON) -> 1-2-3 (schéma)
2.3.4. Relais bistable double bobine (version à L293D)
Bien entendu, comme précédemment, on peut aussi piloter ces relais avec un
L293D. On pourra également piloter 2 relais :
Ce code permet de piloter 1 relais bistable double bobine :
#define RELAY_EN_1_2 8
#define RELAY_IN1 7
#define RELAY_IN2 6
void setup()
{
Serial.begin(115200);
pinMode(RELAY_IN1, OUTPUT);
pinMode(RELAY_IN2, OUTPUT);
pinMode(RELAY_EN_1_2, OUTPUT);
digitalWrite(RELAY_EN_1_2, HIGH);
}
void relay_on(void)
{
Serial.println("ON");
digitalWrite(RELAY_IN2, LOW);
delay(100);
digitalWrite(RELAY_IN2, HIGH);
}
void relay_off(void)
{
Serial.println("OFF");
digitalWrite(RELAY_IN1, LOW);
delay(100);
digitalWrite(RELAY_IN1, HIGH);
}
void loop()
{
relay_on();
delay(2000);
relay_off();
delay(2000);
}
Le pilotage des bobines est en logique inverse car le point commun des bobines est relié au +5V, comme préconisé dans la datasheet.
3. Le transistor unipolaire
On voit beaucoup de montages utilisant un
IRLZ44N, mais n'est-ce pas dommage d'utiliser un transistor supportant 47A pour commuter 70mA ?
Certains objecteront qu'il a une résistance RDSon très faible de 22mΩ qui occasionnera une chute de tension très faible.
Nous allons essayer d'abord un
2N7000.
Il supporte une tension drain-source de 60V, un courant de drain de 200mA et a une résistance RDSon maximale de 6Ω pour une tension VGS de 4.5Vdc et un courant de drain de 75mA.
Voici le schéma de branchement.
Le transistor est piloté par une sortie du microcontrôleur à travers une résistance de 220Ω dont le but est de limiter le courant d'appel lors de la montée du signal sur la gate. Une résistance de pull-down de 100KΩ est câblée entre gate et source afin de ne pas laisser la gate en l'air dans le cas où la sortie du microcontrôleur est en haute impédance, au démarrage par exemple.
Maintenant que nous avons expliqué ces notions de base, nous allons essayer de faire fonctionner ce montage à l'aide du même ARDUINO NANO que précédemment,en gardant le même sketch.
Mesurons maintenant la chute de tension entre drain et source du MOSFET.
Elle est de 165mV.
Cela donne une résistance RDSon effective de 2.3Ω, ce qui veut dire que l'exemplaire de transistor que je viens de tester est plus que conforme à la datasheet.
En ajoutant une résistance de 3.6Ω entre le drain du transistor et la bobine du relais afin d'atteindre les 6Ω de la datasheet, nous obtenons une chute de tension de 350mV, et le relais colle encore.
Maintenant nous allons essayer un autre transistor, le très connu
BS170.
Il supporte une tension drain-source de 60V, un courant de drain de
500mA et a une résistance RDSon maximale de 5Ω pour une tension VGS de 10Vdc et un courant de drain de 200mA.
Attention, le brochage est inversé par rapport au 2N7000.
Cette fois-ci nous obtenons une chute de tension de 112mV.
Cela donne une résistance RDSon effective de 1.6Ω.
Bien sûr nous sommes loin des 22mΩ de l'IRLZ44N, mais ces deux transistors offrent des avantages non négligeables :
- petit boîtier :
2N7000 et BS170 = TO92
IRLZ44N = TO220
- petit prix :
2N7000 = 0.06€
BS170 = 0.10€
IRLZ44N = 0.41€
Ces prix proviennent de chez
TME, par 5 ou dix unités.
4. Quel MOSFET choisir
Ci dessous je vous propose une liste de MOSFET de puissance dont certains ont une tension VGSth très faible (en vert) :
5. Les MOSFETS récents
Les MOSFETS récents vous offrent des caractéristiques hors du commun, autant en RDSon qu'en VGSth.
Nous allons rester volontairement dans le domaine des petits MOSFETS susceptibles de convenir pour le pilotage de relais.
Le
FDN327N, un petit monstre :
VDSS = 20V
ID = 2A
RDS(ON) = 70mΩ, 80mΩ, 120mΩ pour VGS = 4.5V, 2.5V, 1.8V
VGS(th) pour VDS=VGS et ID=250 μA = mini 0.4V, typique 0.7V, maxi 1.5V
Le
TN0604 en boîtier traversant :
VDSS = 40V
ID = 1.5A
RDS(ON) = 1.6Ω maxi pour VGS = 5V
VGS(th) pour VDS=VGS et ID=1mA = mini 0.6V, maxi 1.6V
6. Le choix
Car il va bien falloir faire un choix.
Je dirais que la solution à base de transistor bipolaire est plus complexe à mettre en œuvre car elle nécessite de bien étudier la datasheet du transistor et de faire des calculs afin de bien saturer le transistor.
Mais cela reste la moins coûteuse.
La solution à base de MOSFET est plus simple. Il n'y a aucun calcul. Il suffit de choisir un transistor ayant les caractéristiques adéquates.
Une autre particularité est à prendre en compte : la tension de seuil de conduction "Gate Threshold Voltage". Pour les deux MOSFET présentés ici, cette tension est de 3V pour 1mA.
Si vous choisissez un transistor ayant une tension de seuil de conduction de 10V, les 5V de votre microcontrôleur ne suffiront pas a le faire conduire.
Il faut bien entendu tenir compte de l'historique de chacun. Les jeunes auront tendance à choisir le MOSFET, car plus récemment introduit sur le marché grand public que les bipolaires.
Les anciens, comme moi-même, n'ont même pas étudié le MOSFET à l'université, et ils ont tellement l'habitude d'utiliser des bipolaires que cela devient un réflexe. Même pas besoin d'empoigner la calculette pour calculer la résistance de base.
Et il leur est difficile de sauter le pas. Le MOSFET c'est une autre manière de penser. C'est l'occasion d'essayer.
7. Références
Relais : SONGLE SRD-05V DC-SL-C
Transistor bipolaires : PN2222, 2N3904
MOSFET canal N : 2N7000, BS170
8. Liens utiles
Cordialement
Henri
9. Mises à jour
25/01/2019 : 4. Quel MOSFET choisir
10/04/2019 : 1.3. Le relais REED
27/05/2019 : 2.1. Piloter un relais 12V ou plus
11/06/2019 : 1.4. Le relais statique
1.5. Le module relais
1.7. Le relais miniature
1.2. La charge inductive
29/06/2019 : 1.2. La charge inductive (ajout varistance)
29/08/2019 : 2.2. Piloter un relais bistable
31/08/2019 : 2.2.1. Relais bistable simple bobine (L293D)
19/09/2019 : 1.1. La diode de roue libre
10/12/2019 : 1.1. La diode de roue libre (compléments)