
Porte Motorisée de Poulailler (4ème Partie)
Ceci est la suite des articles précédents :
Porte Motorisée de Poulailler (1ère Partie)
Porte Motorisée de Poulailler (2ème Partie)
Porte Motorisée de Poulailler (1ère Partie)
Porte Motorisée de Poulailler (2ème Partie)
Aujourd'hui nous allons étudier la version à moteur continu et poulie crantée.
1. Mécanique
Le schéma de principe et les cotes sont ceux vus en première partie :
Le seule différence est que la poulie intermédiaire (sous la poulie de renvoi qui se trouve immédiatement sous le moteur) disparaît. En effet vu la taille réduite du moteur, elle n'a aucun intérêt.
Le montage a pris quelques heures :
 |
| Vue d'ensemble (la hauteur est de 1.20m) |
 |
| Support moteur |
 |
| Poulie de renvoi (porte ouverte) |
 |
| Poulie inférieure |
 |
| Poulie inférieure (porte fermée) |
Les supports de poulies ainsi que le support moteur sont réalisés dans une feuille d'aluminium de 1mm d'épaisseur, à l'aide d'une cisaille, une perceuse et une lime. Le pliage est réalisé à l'étau.
Comme prévu (voir première partie) un
profilé plat (10mm x 2mm x 40cm) en acier est fixé sur la porte à l'aide d'un petit boulon (photo 3) et à la poulie à l'aide d'une pince (photo 2 et 4).
La pièce plate de la pince (côté gauche) est un morceau du même profilé (10mm x 2mm) de 40mm de longueur percé en son centre (diamètre 4mm).
Un trou de 4mm est pratiqué dans la courroie afin de laisser passer la vis de fixation.
Comme on le voit sur les photos 2 et 4 la pince doit pouvoir évoluer entre les deux supports de poulie sans les rencontrer. L'écartement entre les deux supports est d'au minimum 32cm + la longueur de la pince (40mm). J'ai donc prévu 40cm.
La courroie fait 1m de long et 10mm de large (pitch 2mm) : GKTOOLS
La partie crantée de la pince est ce modèle (pitch 2mm, 10mm de large) :
La poulie moteur est un modèle 4mm 16 dents : GKTOOLS
Les 2 autres poulies sont des modèles 4mm 20 dents : GKTOOLS
Le moteur adopté est le suivant : JGA25-370
J'avais choisi un modèle 36 tours par minute mais le modèle 60 tours / minute s'avère plus intéressant. Ceci est expliqué plus loin.
2. L'électronique
Je rappelle le schéma publié en 3ème partie :

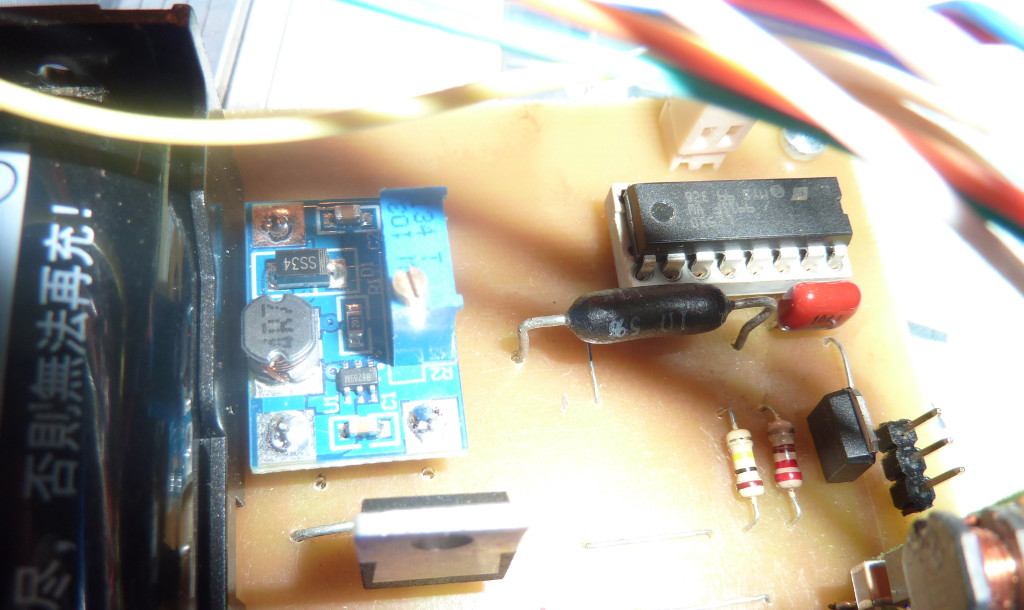
Les composants suivants ont été ajoutés à la carte de puissance :
- le L293D avec son condensateur de découplage (à droite)
- son transistor de commutation d'alimentation Q1 AOI403 (en bas à droite)
- le convertisseur SX1308 (à gauche)
- le connecteur P4 (en haut à droite)
Quelques essais préliminaires montrent que le MT3608 et le SX1308 ont un fonctionnement assez équivalent. On peut utiliser l'un ou l'autre. La carte de puissance est capable d’accueillir l'un ou l'autre modèle.
Le convertisseur FP6293-5V et le connecteur P3 dédiés à la version à servomoteur deviennent bien évidemment inutiles. Je ne les ai pas retirés pour l'instant.
Le moteur 30 tours / minute a beaucoup trop de couple et la courroie a tendance à sauter de quelques crans avant l'arrêt moteur. Le risque de dégrader la courroie est important. De plus l'arrêt moteur est difficile à détecter à l'aide de la mesure de courant.
Il a été changé pour un modèle 60 tours / minute. Le nouveau moteur met 11 secondes à ouvrir ou fermer la porte et consomme deux fois moins de courant (120mA maximum au lieu de 200mA).
Il sera facile avec ce moteur d'augmenter le temps d'ouverture et de fermeture de la porte en agissant sur la valeur du rapport PWM appliqué au L293D.
Il y a fort à parier que même un modèle 130 tours / minute convienne, avec un rapport PWM adapté.
La résistance shunt (R8) est de 1.5Ω. Ce shunt provoque une chute de tension de 180mV quand le moteur tourne (il consomme 120mA), négligeable par rapport aux 12V de l'alimentation.
La puissance supportée par cette résistance est faible : 20mW. Un modèle 1/4W peut convenir.
Celle que j'avais prévue (2W) était surdimensionnée au cas où j'utiliserais un moteur plus puissant.
Le contact de fin de course n'est pas utilisé. Lors du démarrage du logiciel, si la porte est ouverte et qu'il fait jour, une commande d'ouverture est envoyée. Comme le moteur se bloque immédiatement, le logiciel l'arrête aussitôt.
3. Le logiciel
Le sketch a évolué :
Le courant moteur est mesuré pendant l'ouverture et la fermeture. Lorsque la porte arrive en fin de course, le courant dépasse la consigne et le moteur est arrêté.
Les paramètres (options.h) sont plus nombreux :
#define IMOTOR_SHUNT 1.5
#define MOTOR_MAX_ONTIME 25000
#define MOTOR_CURRENT 0.05
#define MOTOR_CURRENT 0.05
PWM désigne le rapport de modulation de largeur d'impulsion du signal appliqué à la pin EN du L293D. Le maximum est de 255 (pleine vitesse).
IMOTOR_SHUNT est la valeur de la résistance shunt de mesure du courant moteur (R8 sur le schéma).
MOTOR_MAX_ONTIME est le temps de fonctionnement maximal autorisé pour le moteur. Le moteur est coupé si ce temps est dépassé. Cela pourrait se produire par exemple en cas de problème :
- courroie détendue
- courroie rompue
- problème électronique
MOTOR_CURRENT est le courant maximal autorisé pour le moteur. Avec un rapport PWM de 120, le courant n'excède pas 30mA.
Il est bien évident que ces paramètres sont directement dépendants du moteur et des poulies utilisées.
Il est facile de les régler. Au départ la courroie est laissée libre, c'est à dire que la pince de fixation au profilé de manœuvre de la porte n'est pas mise en place.
Le premier paramètre à régler est le PWM. On pourra fixer ainsi le temps d'ouverture et de fermeture de la porte.
On peut chronométrer le temps que met un trait à la craie sur la courroie pour parcourir les 32cm nécessaires.
Par exemple, avec le matériel que j'ai utilisé un PWM de 120 permet d'ouvrir la porte en 20 secondes.
Lors de l'ouverture et de la fermeture de la porte le sketch affiche le courant moteur en temps réel sur la console. Il suffit d'utiliser les boutons pour ouvrir et fermer la porte et de donner à MOTOR_CURRENT une valeur supérieure de 20% à la valeur maximale affichée.
Le temps d'ouverture ou de fermeture peut facilement être estimé en connaissant la vitesse de rotation du moteur et le diamètre de la poulie moteur.
On peut également chronométrer le temps que met un trait à la craie sur la courroie pour parcourir les 32cm nécessaires.
On donnera à MOTOR_MAX_ONTIME une valeur supérieure : 20% suffisent.
4. Remarques
4.1. Le chargeur
Le TP4056 a tendance a entrer en protection en fin de course si le moteur utilisé est trop puissant. C'était assez souvent le cas avec le moteur 30 tours / minute.
Il existe deux modèles de chargeur TP4056 :
 |
| Avec protection |
 |
| Sans protection |
On peut adopter le modèle sans protection.
Si l'on utilise le modèle avec protection et que celle-ci se déclenche on peut relier les bornes OUT- et B-, ce qui la désactivera.
4.2. Le convertisseur 12V
Les modules MT3608 et SX1308 fonctionnent moins bien avec une tension de batterie proche de 3V. Leur tension de sortie chute à environ 8V. Cela n'empêche pas la porte de s'ouvrir et de se fermer, mais le déplacement est plus lent.Normalement ce genre de situation ne devrait pas arriver, sauf si la batterie arrive en fin de vie.
5. Téléchargements
Le paramétrage correspond à un moteur du type JGA25-370 et un temps d'ouverture de 17 secondes (PWM = 150).
6. Liens utiles
La suite : le bilan
7. Conclusion
Ce montage offre pas mal d'avantages par rapport à celui équipé d'un servomoteur :
- le moteur peut soulever une porte de plusieurs kilos
- aucun contact de fin de course n'est nécessaire
- la porte fermée est plaquée avec force au sol
Le montage mécanique ne m'a pas pris plus de temps, malgré la fabrication des supports de moteur et de poulies. La version à servomoteur nécessitait un levier pas très facile à fabriquer.
Cordialement
Henri