
Porte Motorisée de Poulailler (2ème Partie)
Ceci est la suite de l'article précédent :
https://riton-duino.blogspot.com/2020/04/porte-motorisee-de-poulailler-1ere.html
Aujourd'hui le châssis est monté en version servomoteur, un MG996R.
Pour rappel voici le plan prévu :

1. Les photos

Les glissières en U sont des crémaillères de quincaillerie prévues pour des consoles d'étagères. Leur largeur interne est de 12mm :

La partie haute est une plaque d'OSB de 23.5cm x 57cm x 12mm. Ce matériau est très intéressant pour ce montage car il supporte très bien l'humidité.
La plaque est insérée dans les glissières et fixée par 6 vis à bois dans les trous prévus.
Voici la porte :

N'ayant pas de feuille d'aluminium sous la main elle a été réalisée dans une plaque de PVC (un morceau de couvercle de gaine GTL) de 23cm x 32cm pesant 250 grammes.
Le servomoteur est monté sur un support bois :


Voici le support côté recto :

L'épaisseur totale des cales de bois est de 32mm, de quoi ménager un espace entre le bras de levier et le support OSB : 5mm.
Le bras de levier de 16cm est réalisé dans un morceau de fil d'acier galvanisé d'un diamètre de 3mm. Il est aplati au marteau pour pouvoir le percer et le fixer sur l'axe moteur avec du fil d'acier inox :

Il est ici aussi aplati et percé pour pouvoir attacher la ficelle avec un petit anneau de fil d'acier inox :

Pour pouvoir régler le bras de levier bien vertical en position haute il est facile d'incliner le support moteur :

Le montage se comporte bien. Le servomoteur est commandé degré par degré de 0° à 180° avec un petit délai de 30ms entre chaque pas, ce qui donne 5 secondes d'ouverture ou fermeture.
Si l'on augmente le poids de la porte au delà de 450g le servomoteur cale.
Voici deux vidéos de l'ouverture et de la fermeture :
On peut également utiliser une tige métallique en lieu et place de la ficelle, comme le montre cette vidéo d'un "collègue", achess, du forum ARDUINO :
2. Avancement
2.1. 26/04/2020
2.1.1. Alimentation servomoteurHier le servomoteur était alimenté par une alimentation de labo à découpage 5V.
Aujourd'hui je passe par un MT3608 alimenté sous 4V et réglé sur 6V en sortie, avec un MOSFET pour couper l'entrée du MT3608 quand l'ARDUINO entre en mode sommeil.
Le résultat est un peu moins bon. Le moteur cale à partir de 350g. Plusieurs raisons peuvent être à l'origine de ce problème :
Les longueurs de fils sont différentes. Hier l'alimentation était plus directe.
La breadboard n'améliore pas non plus les choses. Hier le câblage était plus direct, avec moins de contacts intermédiaires.
Il y a fort à parier que le résultat sera meilleur avec une carte électronique équipée de connecteurs de puissance, des piste bien dimensionnées en largeur et très courtes. Même une plaquette à pastilles aura de meilleures performances qu'une breadboard.
2.1.2. BatterieJ'ai fait un essai d'alimentation avec une SAMSUNG 18650 bien fatiguée mais chargée à bloc. Sa tension chute à 3.5V lors de l'ouverture de la porte, lorsque le bras de levier est horizontal, là où l'effort moteur est le plus important.
Cet essai est indispensable car une batterie vieillit, et je préfère tester cette situation défavorable avant tout.
Le MT6308 n'apprécie apparemment pas que sa tension d'entrée descende trop bas lorsque sa tension de sortie est faible. Dans le cas de l'utilisation avec un servomoteur elle est de 5V ou 6V et cette tension s'écroule.
Avec une tension de sortie de 12V ou plus son comportement est bien meilleur.
Le remplacement par un FP6293 5V améliore beaucoup les choses :

Sa tension de sortie ne chute que de 100mV.
Ce test démontre également l'importance d'une surveillance de la tension de la batterie.
2.2. 27/04/2020
2.2.1. BoutonsLes deux boutons d'ouverture / fermeture manuelles sont ajoutés. Ils sont branchés sur les broches 2 et 3, afin d'autoriser le réveil par interruption.
Lorsqu'une commande manuelle est effectuée, le logiciel passe en mode manuel, et ce mode sera désactivé au bout d'un temps défini, et le mode automatique reprendra alors la main.
Si l'on a fermé la porte manuellement en journée, elle sera ouverte à nouveau plus tard, ceci afin d'éviter les oublis.
2.2.2. Batterie
La capacité de la batterie est mesurée régulièrement. Cette information sera remontée au serveur DOMOTICZ, si cette option est choisie.
Une mesure moyenne de la tension de la batterie est effectuée pendant les ouvertures et fermetures de la porte.
Cela permet de se faire une idée de l'état de la batterie, car une batterie en mauvais état, même si sa tension à vide est normale, peut voir sa tension en décharge chuter assez bas.
Si la tension de la batterie descend en dessous de 3V la LED rouge clignote 5 fois. Il sera donc possible de tester la batterie régulièrement, en utilisant les commandes manuelles, de préférence la commande d'ouverture car elle consomme plus de courant.
2.2.3. Panneau solaireLa tension du panneau solaire est mesurée régulièrement. Elle pourra être remontée également au serveur DOMOTICZ.
2.2.4. ChargeurJe remarque que lorsque je change la batterie pour en essayer différents modèles, lorsque la batterie est retirée la tension de sortie du TP4056 reste à 4.1V, ce qui est très intéressant et confirme que le choix de ce chargeur est une très bonne option.
2.2.5. LuminositéLa porte s'ouvre et se ferme maintenant en fonction de la luminosité. Celle-ci est mesurée soit grâce à une LDR du type GL5528 soit grâce à la tension du panneau solaire.
Lorsque le panneau est en plein soleil il fournit 18V, lorsqu'il est à l'ombre la tension chute à 17V, mais si le chargeur TP4056 consomme du courant pour charger la batterie (environ 50mA), la tension panneau est de seulement 5.7V.
Il va être difficile d'étudier une solution convenant à tous les types de panneaux, et surtout à toutes les orientations. Si le panneau est ensoleillé ou à l'ombre le soir ou le matin le résultat sera forcément différent.
Mais cela ne devrait pas être impossible pour autant. Si l'on empêche le panneau solaire de charger la batterie pendant la mesure sa tension sera égale à sa tension à vide, donc elle sera strictement dépendante de la luminosité.
En attendant une LDR a été ajoutée. Cela restera une option.
Une autre possibilité existe : ouvrir et fermer en fonction de l'heure et de la date, donc en fonction des heures de lever et de coucher officiels du soleil.
Pour cela il faudrait un circuit horloger du genre DS3231.
Avec l'option liaison radio avec un serveur DOMOTICZ cette possibilité pourrait être mise en œuvre encore plus facilement puisque le serveur pourra nous fournir l'heure et la date à la demande.
Cette option permettra en outre de s'affranchir de la luminosité artificielle, un éclairage public à proximité par exemple.
2.2.6. Contact de fin de course
Lorsque le logiciel démarre il est impossible de savoir dans quelle position est la porte.
Si on suppose qu'elle est fermée et qu'on est en journée, il va falloir ouvrir au démarrage. Les ordres envoyés au servomoteur vont être des ordres d'ouverture de 0°, 1°, 2°, etc. jusqu'à arriver à 180°.
Or si la porte est déjà ouverte au départ le premier ordre va fermer brutalement celle-ci, ce qui peut entraîner des problèmes.
Si la porte est équipée d'un contrepoids par exemple, celui-ci va avoir tendance à ralentir sa chute, la ficelle va se détendre et peut sortir de la poulie, s'emmêler, etc.
Sans contrepoids la fermeture brutale se passe bien. Par contre si un oiseau passe dessous à ce moment-là, il risque de subir un choc. La probabilité est malgré tout très faible.J'ai donc ajouté un contact de fin de course haut :

Une cale vissée sur le haut de la porte actionne le contact lorsqu'elle est en position ouverte. Ce contact est optionnel.
Il serait préférable d'utiliser un contact REED :

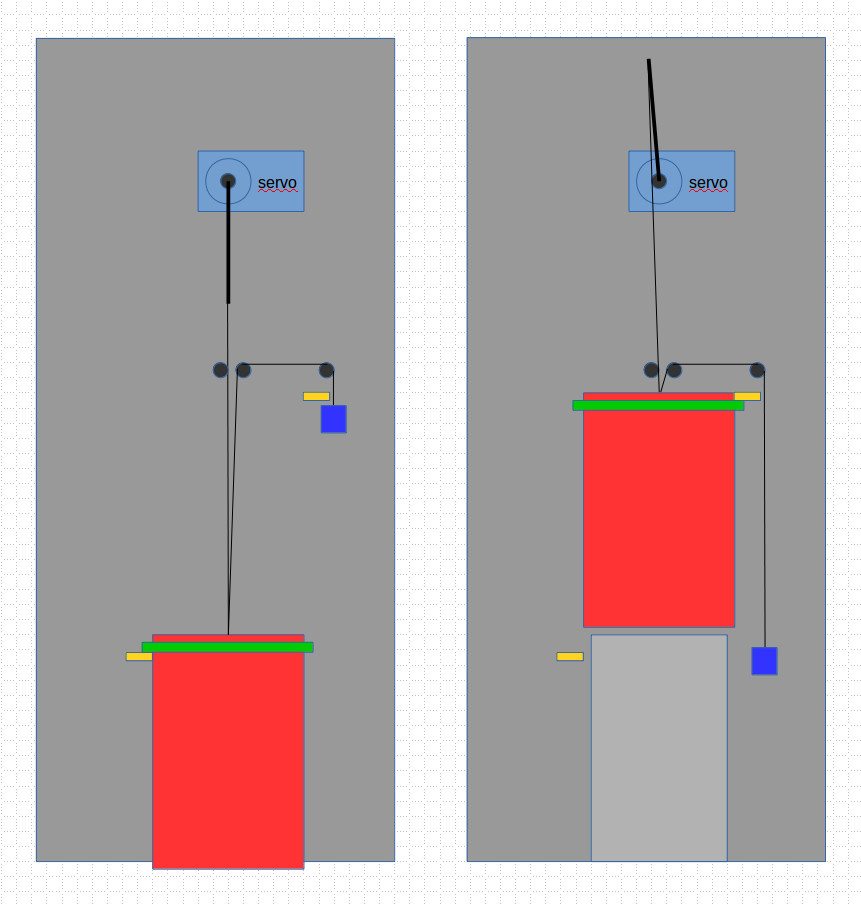
Sur ce dessin les contacts de fin de course sont en jaune.
Il faut bien être conscient par contre que si aucun des contacts fins de course n'est actionné on se trouve dans l'incapacité de déterminer la position de la porte. C'est pour cela que je préfère utiliser un seul capteur en haut.
2.3. 29/04/2020
2.3.1. LuminositéLa mesure de luminosité à l'aide du panneau est problématique.
Prenons comme exemple ce scénario :
- la batterie est chargée à bloc
- le soleil se lève
- la tension du panneau grimpe rapidement
- -> la porte s'ouvre
- -> la tension de la batterie chute pendant l'ouverture
- -> la recharge de la batterie démarre
- -> la tension du panneau chute à cause de la recharge
- -> la porte se referme
Ce scénario peut se répéter plusieurs fois le matin.
La recharge de la batterie suite à l'ouverture ou fermeture de la porte est systématique. Ensuite la durée de la recharge dépendra de l'ensoleillement.
Pendant la recharge, par luminosité faible, la tension du panneau peut être de 6V seulement, et monter à 12V immédiatement après la recharge.
Cela entraîne une grande difficulté pour déterminer une valeur de luminosité si l'on n'est pas capable de savoir si la batterie est en cours de recharge ou non.
Si le panneau solaire n'est pas relié au chargeur la tension de celui-ci sera vraiment dépendante de la luminosité et cela facilitera les choses.
J'envisage sérieusement d'ajouter un MOSFET entre le panneau et le chargeur afin de couper le panneau pendant les ouvertures et fermetures, sans cela je pense que la mesure de luminosité par LDR sera largement préférable, car elle reste totalement indépendante de la recharge de la batterie.
2.4. 08/08/2020
2.4.1. Servomoteur sans fin de course
Comme dit dans le dernier article, le servomoteur peut être légèrement modifié (ajout d'un fil) afin de pouvoir récupérer sa position.
https://riton-duino.blogspot.com/2020/07/porte-motorisee-de-poulailler-le-bilan.html
Voir le paragraphe 8.2. Servomoteur sans fin de course
3. Téléchargements
Cette deuxième version est disponible ici :
4. Liens utiles
La troisième partie :
https://riton-duino.blogspot.com/2020/05/porte-motorisee-de-poulailler-3eme.html
4. Conclusion
Ce servomoteur a un couple suffisant pour une porte de ce type. Il est alimenté sous 5V.
Si la porte est plus lourde et si l'on veut assurer une ouverture sans échec il est possible d'aider le servomoteur en ajoutant un contrepoids :

Cette technique peut être utilisée également si le servomoteur est moins puissant que le MG996R, ou si l'on utilise une batterie de capacité moindre ou en mauvais état.
Pour conclure, le montage est simplissime et à la portée de n'importe quel bricoleur. Il m'a pris une demi-journée. Il ne nécessite aucun matériel spécialisé en dehors d'une perceuse-visseuse, un marteau, quelques pinces, une scie.
Cordialement
Henri
Aucun commentaire:
Enregistrer un commentaire